1.电动缸的技术
1.1电动缸搭配伺服电机和伺服控制系统,电机功率不应小于750w。
1.2电动缸最大推力和最大拉力均不小于20kN,最大行程为±200mm(共400mm)。
1.3电动缸搭配静态拉压一体力传感器,力传感器显示拉正压负,试验力精度要求为:1%-100%FS范围内,各点均不大于示值力的±0.5%。
1.4电动缸的位移显示和位移控制精度为:全量程范围内,误差均不超过±0.05mm。
1.5电动缸适合水平加载,也适合竖向加载,可以自由空间姿态进行加载。
1.6电动缸采用折返式。
1.7电动缸底部为法兰连接,端部配力传感器和球铰。
1.8加载速度:可实现100mm/s和10kN/s范围内的加载速率任意调节。
1.9全量程静载试验,可完成力保持60min以上,掉力时可自动补荷。
1.10电动缸总体重量不超过100kg,缸体与控制连接线可拆卸。
2.集成控制系统的技术:
2.1控制设备为控制双通道设置,可实现单缸工作、双缸独立工作和双缸协同加载工作的方式。
2.2采集端口除必备的力传感器和缸体位移信号采集外,需预留两个位移传感器接口和两个应变传感器接口(接口需与我方提供的传感器匹配)。
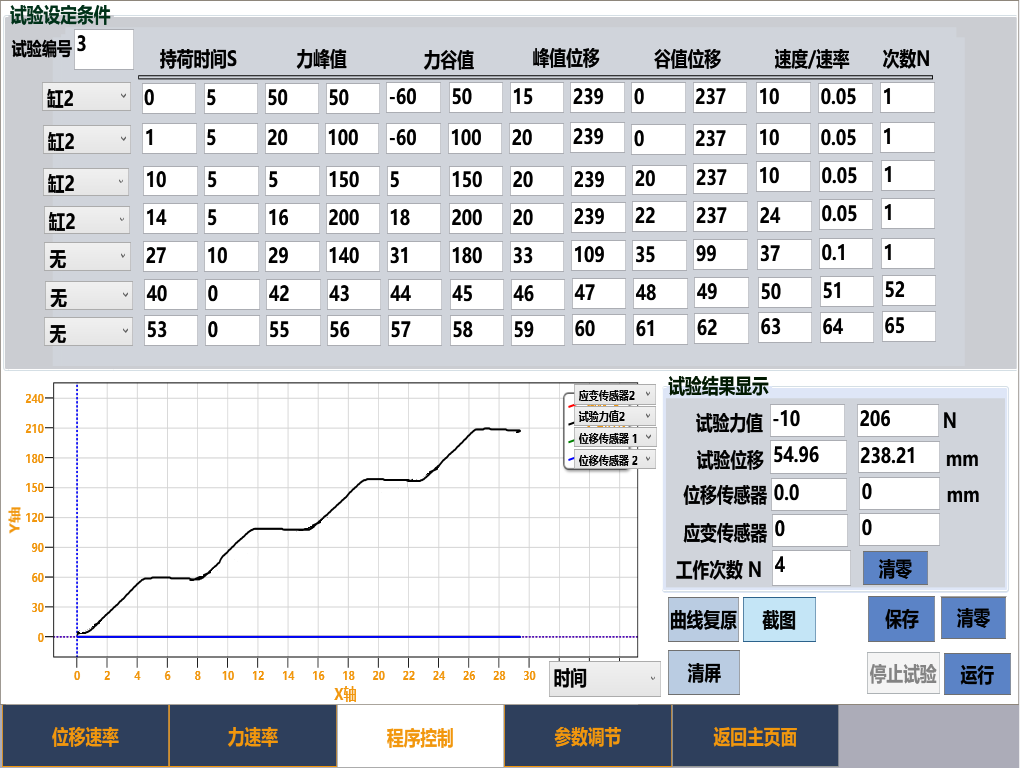
2.3静载试验速率控制可实现力值速率控制、位移速率控制和程序控制。
2.4试验停止控制方式为:
a) 仅设置目标力(推正拉负),到达目标力时停止试验;
b)仅设置目标位移(为绝对位移),到达目标位移时停止试验;
c)同时设置目标力和目标位移,以先达到的参数停止试验;
d)设置持荷时间,达到持荷时间停止试验;
e)程序控制时,可分步骤设置动作(控制方式、目标参数、持荷时间等)。
2.5显示界面和功能
a)参数设置界面,需可以设置试验速率、目标参数、控制方式、曲线X/Y轴定义(曲线轴定义时,可选用试验力、试验位移、绝对位移和外接传感器)、试验力清零、试验位移清零等。
b)两台电动缸的控制参数可分界面设置,亦可在同界面设置。
c)试验开始后,主界面应显示实时力、试验位移、绝对位移、试验曲线和外接设备的实时值;双缸工作时,主界面应将两台缸的上述信息显示在同一界面。(绝对位移:缸在中位时为绝对零点,推正拉负,不可清零;试验位移:试验开始后缸的位移绝对值,可清零,当执行低周往复时,试验位移值为绝对值叠加)
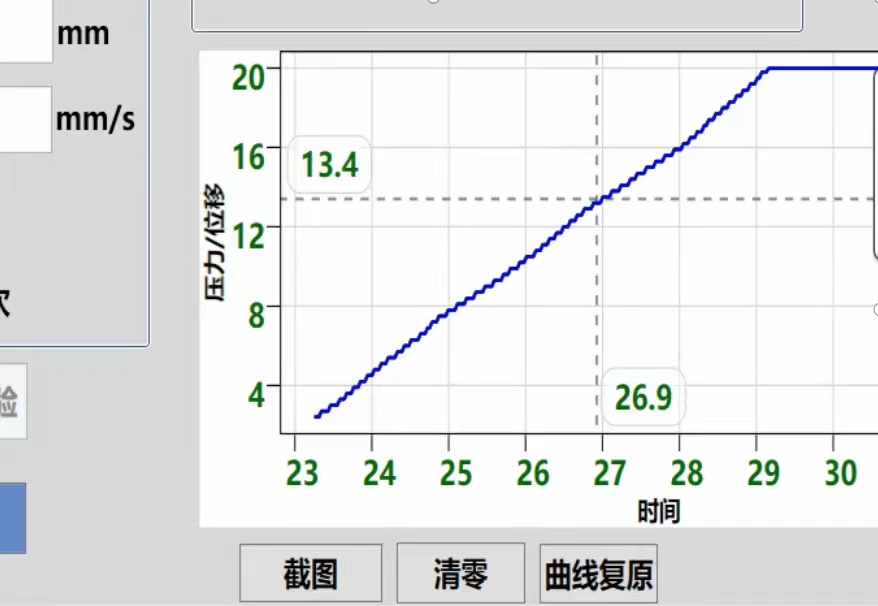
d)曲线可通过鼠标点击,读取坐标点。
2.6当两台电动缸同时作用同一样品时,应实现协同加载,并实现以下功能:
a)可选择两台缸同时加载和同时停止的功能;
b)两台缸互相影响时,应有协同调整的功能,并实现稳定。
2.7试验数据可存储并导出 91/S。
2.8需配备传感器校准功能,通过调节灵敏度系数,对力传感器、位移传感器和应变传感器进行校准。
产品详情