

四通道静力加载电动缸试验台
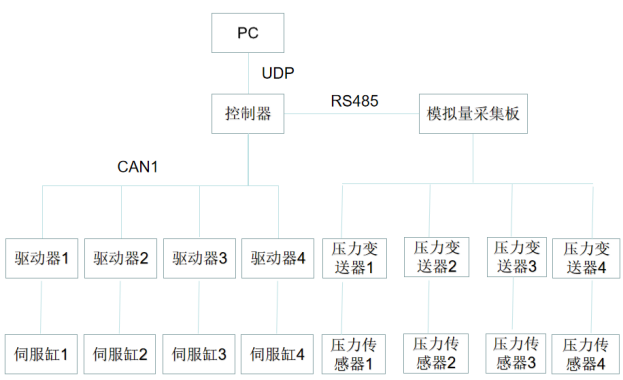
- 静力试验控制系统拟采取上位机+嵌入式下位机的总体结构,上位机采用工控主机以UDP方式与下位机通讯。上位机负责试验加载、曲线显示、数据保存、数据回放等功能,下位机实现加载命令执行、实时数据采集、电流反馈控制、力反馈控制、位置反馈控制和极限位置控制,总体结构如图1所示。
-
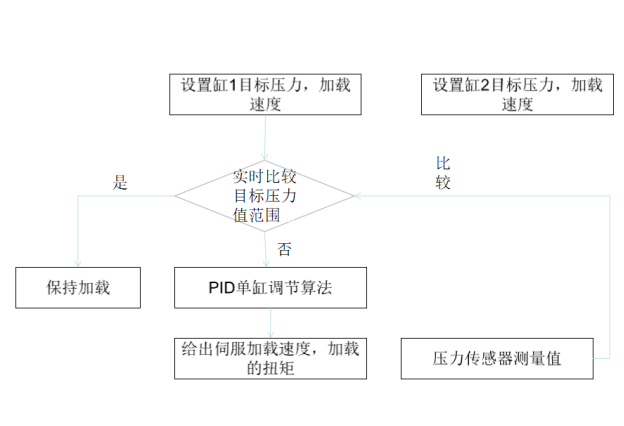
模拟量采集板采集的数据通过CAN总线或者485传输给运动控制器,运动控制根据PC发送的指令,控制指令包含目标压力值,限制的位移,限制的运动速度,压力判断阈值等相关的参数,结合采集板采集过来的数据,通过PID调节,发送运动指令给伺服电机,伺服电机实时反馈电动的位置,并为结合模拟量采集的的压力值形成闭环控制。在运动过程中,产生的压力跟位置值,通过运动控制器的UDP传输给上位机,上位机实时显示电动缸的位移以及压力值。




